クリーンルームでの自動化を実現:モバイルロボット搭載用電動リフトテーブルの開発

| 業界 | エレクトロニクス工場 | 用途 | モバイルロボット(AMR)への搭載 |
|---|---|---|---|
| テーブル サイズ |
890㎜×1140㎜ | 積載荷重 | 1150kg |
| ストローク | 300㎜ | 型式 | KGL-0911-03-1.15 |
| 特注範囲 | 電動ツインカム方式、バッテリーからの電源供給、クリーンルーム仕様 | ||
| 課題 | 自動化、小型化、移動式 | ||
お客様の課題
クリーンルーム内のピッキング作業において、モバイルロボットにリフトテーブルを積載した自動化装置を製作したいとご相談をいただきました。当事例において、お客様には以下の課題がありました。
① クリーン環境への適合(クラス10,000)
従来の油圧式リフトでは、作動油の漏洩リスクやミスト飛散の懸念があり、クラス10,000のクリーンルーム基準を満たすことが困難でした。
② モバイルロボットの積載制限に伴う「徹底した軽量化」
搬送を担うロボット側の耐荷重には上限があるため、リフトテーブル自体を可能な限り軽量化する必要があるが、積載荷重や剛性は落とすことはできない。
③ 高度な停止精度と安全性
ロボットとの連携において、油圧式特有の「自然降下」は許容されません。また、搬送中の振動や油漏れによる稼働停止リスクを完全に排除したい。
これらの課題を解決できる提案を行った、当社をご選定いただきました。
提案内容・導入効果
当社はこれらの課題を解決するため、従来の油圧技術のノウハウを活かしつつ、軽量かつ高荷重を実現できる「電動ツインカム式リフトテーブル」にて提案・設計いたしました。
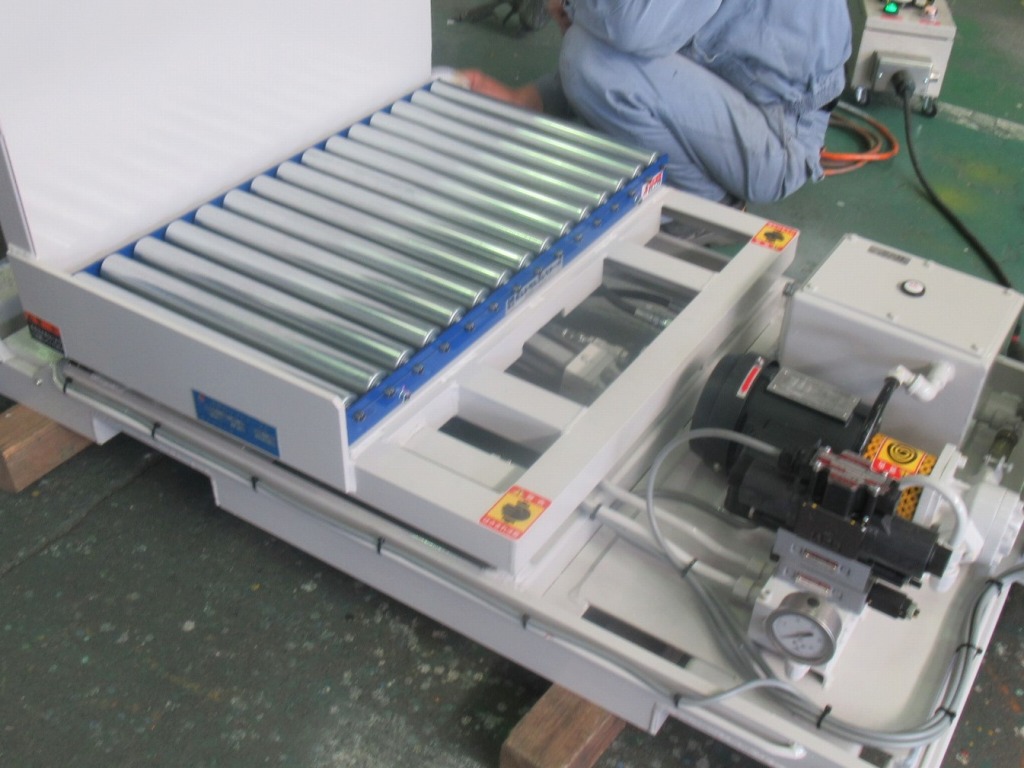
1. 油圧を使用しない「電動ツインカム方式」によるクリーン化と高精度化
課題①および③に対し、駆動源を油圧から電動モータとツインカム機構に変更しました。これにより油漏れリスクをゼロにし、クリーンルーム(クラス10,000)への対応を実現。さらに電動化によって自然降下を完全に排除し、求められていたミリ単位の停止精度を確保しました。
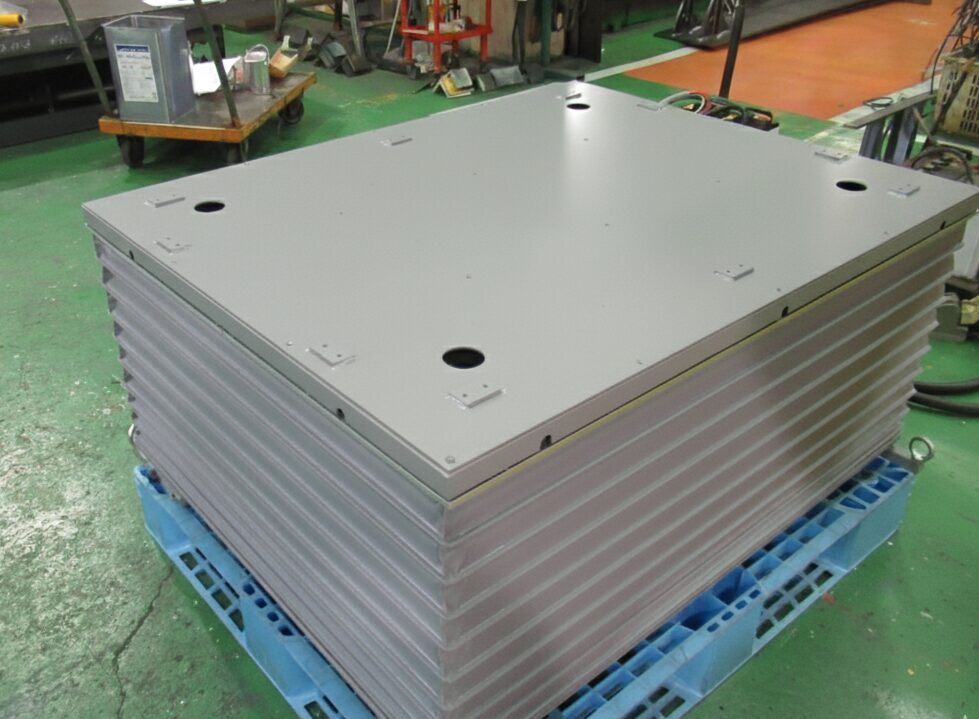
2. 構造解析に基づくフレームの徹底した軽量化設計
課題②の重量制限をクリアするため、フレーム構成部材を見直しました。強度計算を繰り返し、強度を維持したまま肉抜き加工や部材の薄肉化を実施。剛性を損なうことなく、ロボットの走行性能を最大限に引き出す超軽量ボディを実現しました。
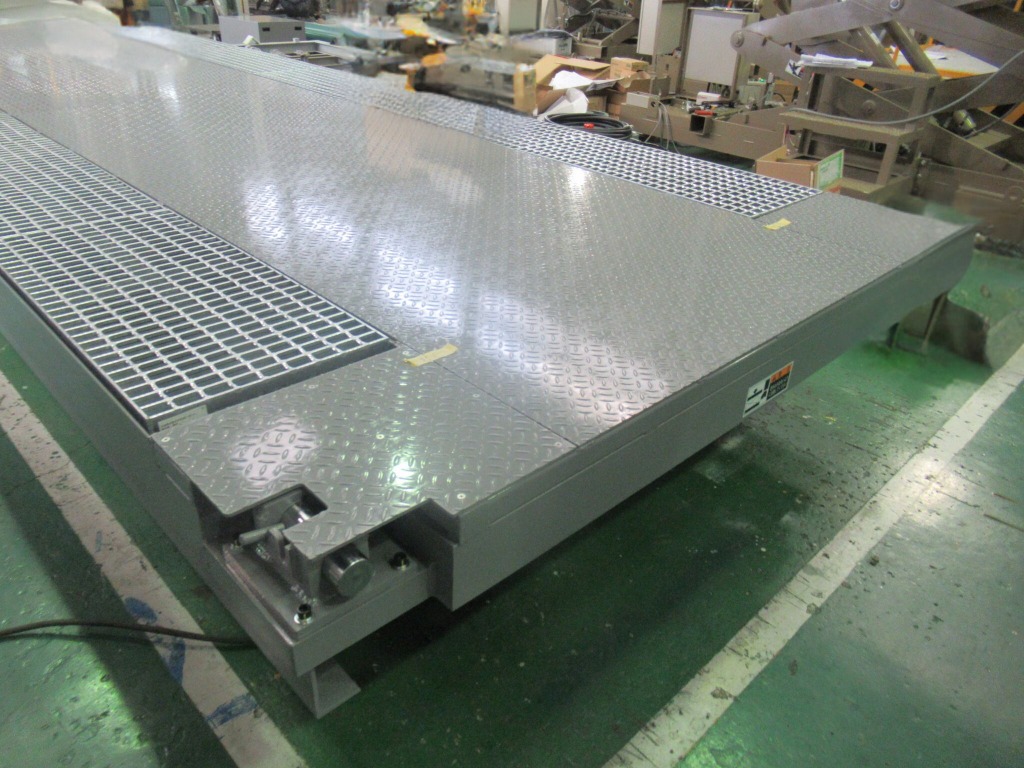
3. 低発塵性ジャバラによる発塵対策
クリーン度をより確実なものにするため、リフトテーブルの4面すべてに「低発塵性素材」のジャバラを装着しました。昇降時に発生する微細な摩耗粉を外部へ飛散させない構造とし、環境の汚染を防ぎながら安定稼働をサポートします。
4. 自動化・ロボット連携への最適化
電動式への移行により、ロボット側の制御システムとの親和性も向上しました。位置制御や速度制御が容易になり、自動化の促進に大きく貢献いたしました。
リフトテーブル ソリューションナビを運営する株式会社河原は、本事例のような「クリーンルーム×ロボット×自動化」といった最先端の現場ニーズに対し、油圧・電動の両面から最適な解を導き出します。特注仕様のモバイルロボット搭載リフトでお困りの際は、ぜひ当社の技術力をご活用ください。
関連する特注開発事例・課題解決事例
-

コイル材投入用 傾斜機能付リフトテーブル
業界:製紙業
用途:アンコイラー装置への紙コイル材の投入
テーブルサイズ:1300㎜×1700㎜
積載荷重:2,500㎏ -

電波暗室の試験を邪魔しない!地下へ完全格納する特注リフト
業界:情報機器生産工場
用途:電波吸収体用ラックの地下格納
テーブルサイズ:2700㎜×2700㎜
積載荷重:2,050㎏ -

積載10ton・傾斜50° 転倒試験用反転装置
業界:農業用機械製造工場
用途:農業用機械の転倒角度検査
テーブルサイズ:6000㎜×4160㎜
積載荷重:10000kg -

4面ジャバラ付 高所作業足場用リフトテーブル
業界:ポンプ製造工場
用途:高所作業足場
テーブルサイズ:1500㎜×2250㎜
積載荷重:400㎏ -

粉砕機投入用 傾斜装置付リフトテーブル
業界:廃棄物処理
用途:自動車スクラップ装置への投入用
テーブルサイズ:2050㎜×5300㎜
積載荷重:1000kg -

天板レール付リフトテーブル
業界:製紙業
用途:オートクレーブへのワーク搬入出用
テーブルサイズ:3000㎜×6425㎜
積載荷重:16,000kg -

荷捌き作業用キャメル式リフトテーブル
業界:食品加工工場
用途:トラックへの荷捌き作業時の高さ調整
テーブルサイズ:1500㎜×1500㎜
積載荷重:1000㎏ -

トラクター製造工場 検査用リフトテーブル
業界:大型農業機械製造業
用途:アンコイラー装置への紙コイル材の投入
テーブルサイズ:3850㎜×2850㎜
積載荷重:14700㎏ -

大型タンク溶接 ワーク昇降用リフトテーブル
業界:大型タンク製造業
用途:大型タンク溶接時のワーク(タンク)昇降用
テーブルサイズ:3500㎜×3500㎜
積載荷重:5000㎏ -

大型ポンプ製造用リフトテーブル フリーステージ付作業足場
業界:ポンプ製造工場
用途:作業用足場
テーブルサイズ:2500㎜×3000㎜
積載荷重:1000㎏ -

半導体製造装置 荷捌き場用リフトテーブル
業界:半導体製造機械組立
用途:荷捌き場(トラックと建物の段差解消)
テーブルサイズ:4,000㎜×6,000㎜
積載荷重:10,000㎏ -

高所作業用スライドテーブル仕様 リフトテーブル
業界:発動機製造
用途:高所作業足場(大型エンジンへのアクセス)
テーブルサイズ:3,000㎜×2,500㎜
積載荷重:500㎏ -

大型建機組立用 自走式 L10mリフトテーブル
業界:建設機械製造工場
用途:作業用足場
テーブルサイズ:1,500㎜×10,000㎜
積載荷重:3,000㎏ -

発電機タービン用大型リフトテーブル フリーステージ付作業足場
業界:発電機タービン製造
用途:作業足場
テーブルサイズ:8,000㎜×9,200㎜
積載荷重:1,500㎏ -

塩水に対する防錆対策を施したリフトテーブル導入
業界:水産加工会社
用途:海産物の投入補助
テーブルサイズ:1,200㎜×1,400㎜
積載荷重:1,500㎏ -

2台連結 特殊テーブル・フリーステージ搭載リフトテーブル
業界:航空機エンジン製造工場
用途:作業用足場
テーブルサイズ:4,180㎜×4,000㎜
積載荷重:500㎏ -

自動式リフト、可変式テーブルの特注対応と、コスト・納期要求への対応
業界:車両製造工場
用途:作業用足場
テーブルサイズ:600㎜×4,200㎜
積載荷重:300㎏ -

鋼塊型抜き用 3台同調制御 大型リフトテーブル
業界:製鉄所
用途:作業用足場
テーブルサイズ:4,600㎜×5,000㎜
積載荷重:21,000kg -
塗装ブース内使用 車両昇降用リフトテーブルのテーブル等特殊仕様
業界:自動車整備工場
用途:重荷重昇降
テーブルサイズ:2,200㎜×5,900㎜
積載荷重:4,000kg -
パレット搬送用リフトテーブル 本質安全防爆仕様の実現
業界:化学工場
用途:生産ライン組み込み
テーブルサイズ:2,600㎜×2,000㎜
積載荷重:550kg -
ドラム缶搬送ライン用反転装置
業界:金属商社、金属リサイクル業者
用途:ドラム缶反転機
テーブルサイズ:750㎜×700㎜
積載荷重:550kg -

コイル搬送・搬出用 自走式小型リフトテーブル
業界:金属加工工場
用途:材料投入・運搬用
テーブルサイズ:550㎜×810㎜
積載荷重:3,000kg -

バス組立用 コの字形状の可動式リフトテーブル
業界:車両製造工場
用途:作業用足場
テーブルサイズ:950㎜×4,400㎜
積載荷重:400kg -

建機積み下ろし用 埋め込み式リフトテーブル
業界:建機リース
用途:ワーク積み下ろし用
テーブルサイズ:2,500㎜×3,000㎜
積載荷重:5,000kg -

SUS仕様足踏式手押し台車付リフトテーブル
業界:製薬工場
用途:材料投入・運搬用
テーブルサイズ:700mm×1,640mm
積載荷重:600kg
